



સ્ટેમ્પિંગ/સ્ટેકિંગ રોબોટ SDCX RMD-300/200/160/120/35/08/110/20/50
ટેકનિકલ પરિમાણો
| મોડેલ નં. | સ્વતંત્રતાની ડિગ્રી | ડ્રાઇવિંગ મોડ | પેલોડ (કેજી) | પુનરાવર્તિત સ્થિતિ ચોકસાઈ (મીમી) | ગતિની શ્રેણી (°) | મહત્તમ ગતિ (°/સે) | કાંડાની માન્ય લોડ જડતા (કિલોગ્રામ·મી2) | ગોળાકાર ધબકારા (ચક્ર/કલાક) | ગતિનો ત્રિજ્યા (મીમી) | સ્થાનિક વજન (કિલો) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 નો પરિચય | 4 | એસી સર્વો ડ્રાઇવ | ૩૦૦ | ±0.5 | ±૧૮૦ | ± +૧૦૦~-૪૪ | ± +૧૨૧~-૧૫ | ±૩૬૦ | 85 | 90 | ૧૦૦ | ૧૯૦ | ૧૩૪ | ૧૦૦૦③ | ૩૧૫૦ | ૧૫૦૦ |
| SDCX-RMD200 નો પરિચય | 4 | એસી સર્વો ડ્રાઇવ | ૨૦૦ | ±૦.૩ | ±૧૮૦ | ± +૧૦૦~-૪૪ | ± +૧૨૧~-૧૫ | ±૩૬૦ | ૧૦૫ | ૧૦૭ | ૧૧૪ | ૨૪૨ | 78 | ૧૩૦૦③ | ૩૧૫૦ | ૧૫૦૦ |
| SDCX-RMD160 નો પરિચય | 4 | એસી સર્વો ડ્રાઇવ | ૧૬૦ | ±૦.૩ | ±૧૮૦ | ± +૧૦૦~-૪૪ | ± +૧૨૧~-૧૫ | ±૩૬૦ | ૧૨૩ | ૧૨૩ | ૧૨૮ | ૩૦૦ | 78 | ૧૫૦૦③ | ૩૧૫૦ | ૧૫૦૦ |
| SDCX-RMD120 નો પરિચય | 4 | એસી સર્વો ડ્રાઇવ | ૧૨૦ | ±૦.૩ | ±૧૮૦ | ± +૧૦૦~-૪૪ | ± +૧૨૧~-૧૫ | ±૩૬૦ | ૧૨૮ | ૧૨૬ | ૧૩૫ | ૩૦૦ | 78 | ૧૫૬૦③ | ૩૧૫૦ | ૧૫૦૦ |
| SDCX-RMD50 નો પરિચય | 4 | એસી સર્વો ડ્રાઇવ | 50 | ±૦.૨ | ±૧૭૮ | ± +૯૦~-૪૦ | ± +૬૫~-૭૮ | ±૩૬૦ | ૧૭૧ | ૧૭૧ | ૧૭૧ | ૨૨૨ | ૪.૫ | ૧૭૦૦② | ૨૦૪૦ | ૬૬૦ |
| SDCX-RMD20 નો પરિચય | 4 | એસી સર્વો ડ્રાઇવ | 20 | ±૦.૦૮ | ±૧૧૭૦ | ± +૧૧૫~-૨૫ | ± +૭૦~-૯૦ | ±૩૬૦ | ૧૭૦ | ૧૭૦ | ૧૮૫ | ૩૩૦ | ૦.૫૧ | ૧૭૮૦① | ૧૭૨૦ | ૨૫૬ |
| SDCX-RMD08 નો પરિચય | 4 | એસી સર્વો ડ્રાઇવ | 8 | ±૦.૦૮ | ±૧૭૦ | ± +૯૦~-૪૦ | ± +૬૮~-૯૦ | ±૩૬૦ | ૨૫૧ | ૧૯૫ | ૧૯૫ | ૩૬૭.૫ | ૦.૨૫ | ૧૮૦૦① | ૧૪૩૩ | ૧૮૦ |
ટિપ્પણીઓ:
① ટેસ્ટ ટ્રેક 150mm ઊંચો અને 1000mm પહોળો છે, અને વાસ્તવિક ચક્ર સમય વાસ્તવિક કાર્યકારી પરિસ્થિતિઓથી પ્રભાવિત થાય છે;
② ટેસ્ટ ટ્રેક 200mm ઊંચો અને 1000mm પહોળો છે, અને વાસ્તવિક ચક્ર સમય વાસ્તવિક કાર્યકારી પરિસ્થિતિઓથી પ્રભાવિત થાય છે;
③ ટેસ્ટ ટ્રેક 400mm ઊંચો અને 2000mm પહોળો છે, અને વાસ્તવિક ચક્ર સમય વાસ્તવિક કાર્યકારી પરિસ્થિતિઓથી પ્રભાવિત થાય છે;
જ્વલનશીલ, વિસ્ફોટક અને કાટ લાગતા વાયુઓ અને પ્રવાહીના સંપર્કથી દૂર રહો; પાણી, તેલ અને ધૂળના છાંટા ન પડે તેનું ધ્યાન રાખો; વિદ્યુત અવાજના સ્ત્રોતો (પ્લાઝ્મા) થી દૂર રહો.
ગતિની શ્રેણી
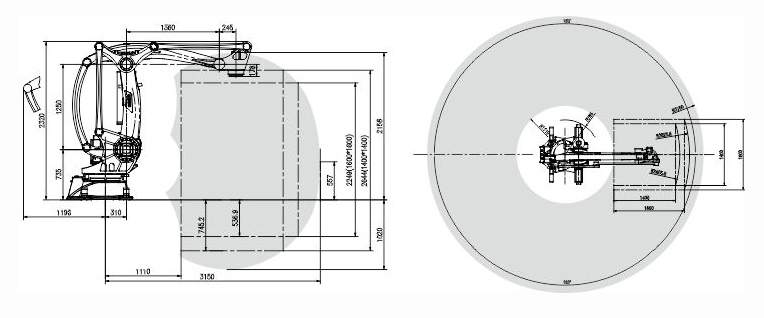
SDCX-RMD300/200/160/120 માટે ગતિ શ્રેણીનો પ્લોટ
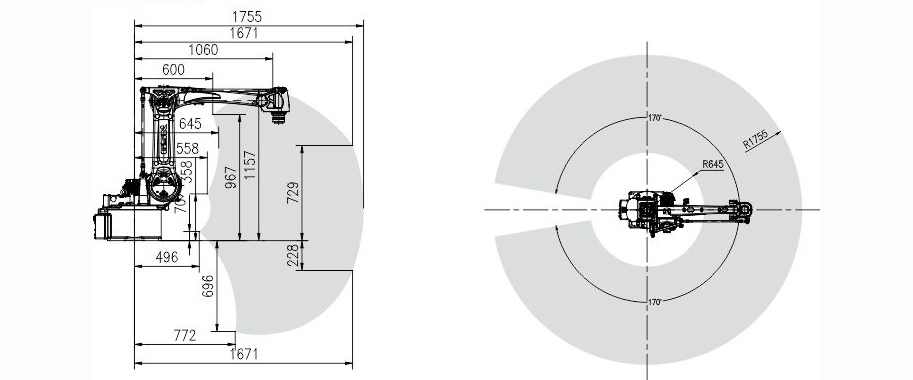
SDCX-RMD20 માટે ગતિ શ્રેણીનો પ્લોટ
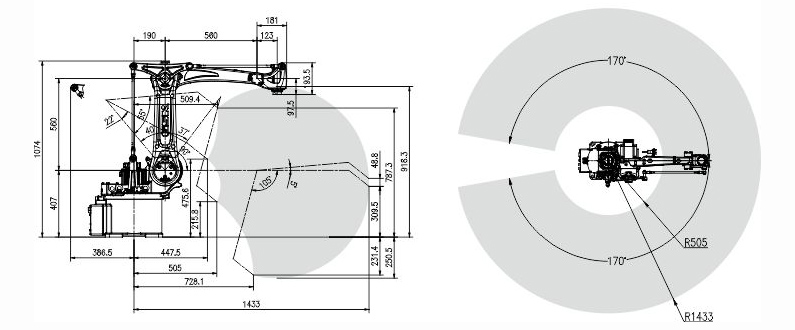
SDCX-RMD08 માટે ગતિ શ્રેણીનો પ્લોટ
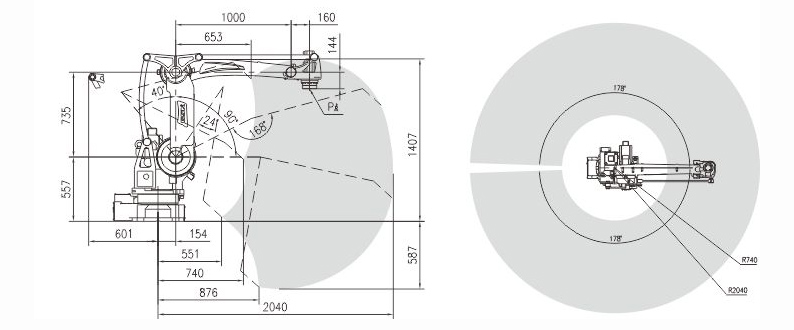
SDCX-RMD50 માટે ગતિ શ્રેણીનો પ્લોટ
ઉત્પાદન એપ્લિકેશન પ્રદર્શન
ઉકેલો
સ્ટીલ કોઇલ હેન્ડલિંગ પ્રોજેક્ટની ટેકનિકલ યોજના












